publications
publications listed in reverse chronological order.
* Equal contribution
Journal
-
 The Kinematics and Dynamics Theories of a Total Lagrangian Finite Element Analysis Framework for Finite Deformation Multibody Dynamics2026Preprint on arXiv.
The Kinematics and Dynamics Theories of a Total Lagrangian Finite Element Analysis Framework for Finite Deformation Multibody Dynamics2026Preprint on arXiv. -
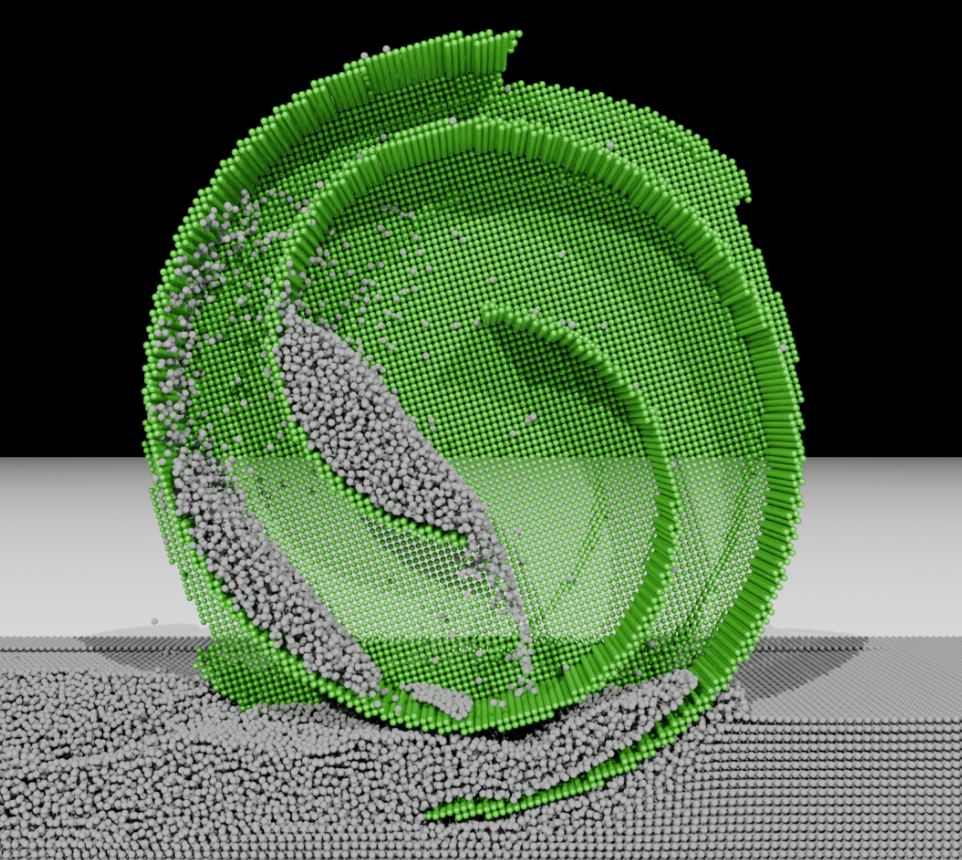 A Physics-Based Continuum Model for Versatile, Scalable, and Fast Terramechanics Simulation2025Submitted to the Journal of Terramechanics (under review).
A Physics-Based Continuum Model for Versatile, Scalable, and Fast Terramechanics Simulation2025Submitted to the Journal of Terramechanics (under review).


Conference
-
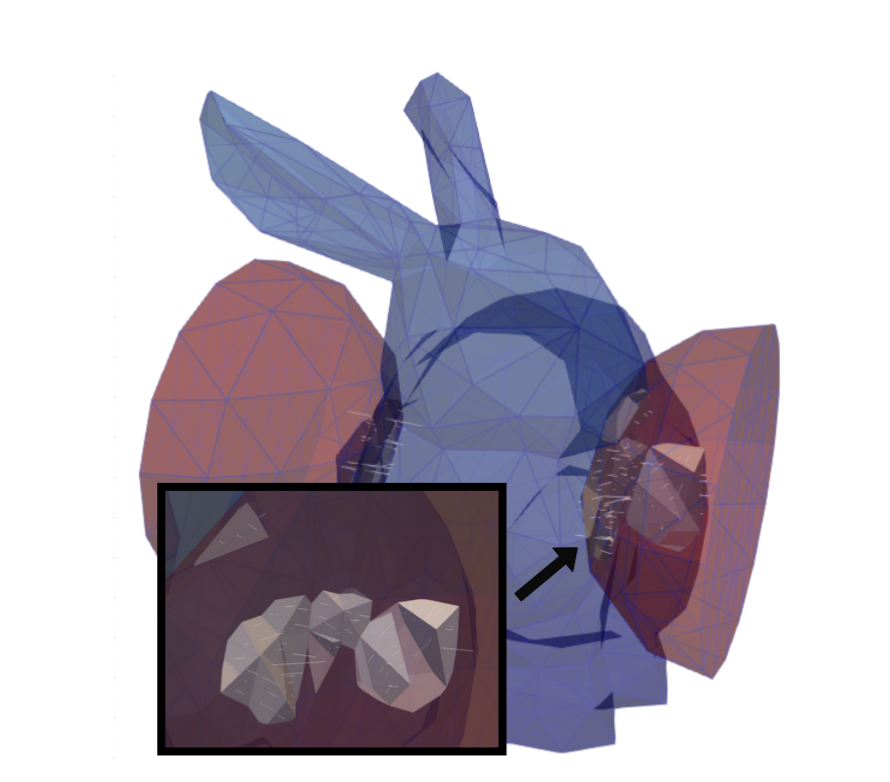 A Total Lagrangian Finite Element Analysis Framework for Finite Deformation Multibody Dynamics (Parts 1, 2, and 3)2026Extended Abstract(s) accepted at the 8th Joint International Conference on Multibody System Dynamics, Sevilla, Spain.
A Total Lagrangian Finite Element Analysis Framework for Finite Deformation Multibody Dynamics (Parts 1, 2, and 3)2026Extended Abstract(s) accepted at the 8th Joint International Conference on Multibody System Dynamics, Sevilla, Spain. -
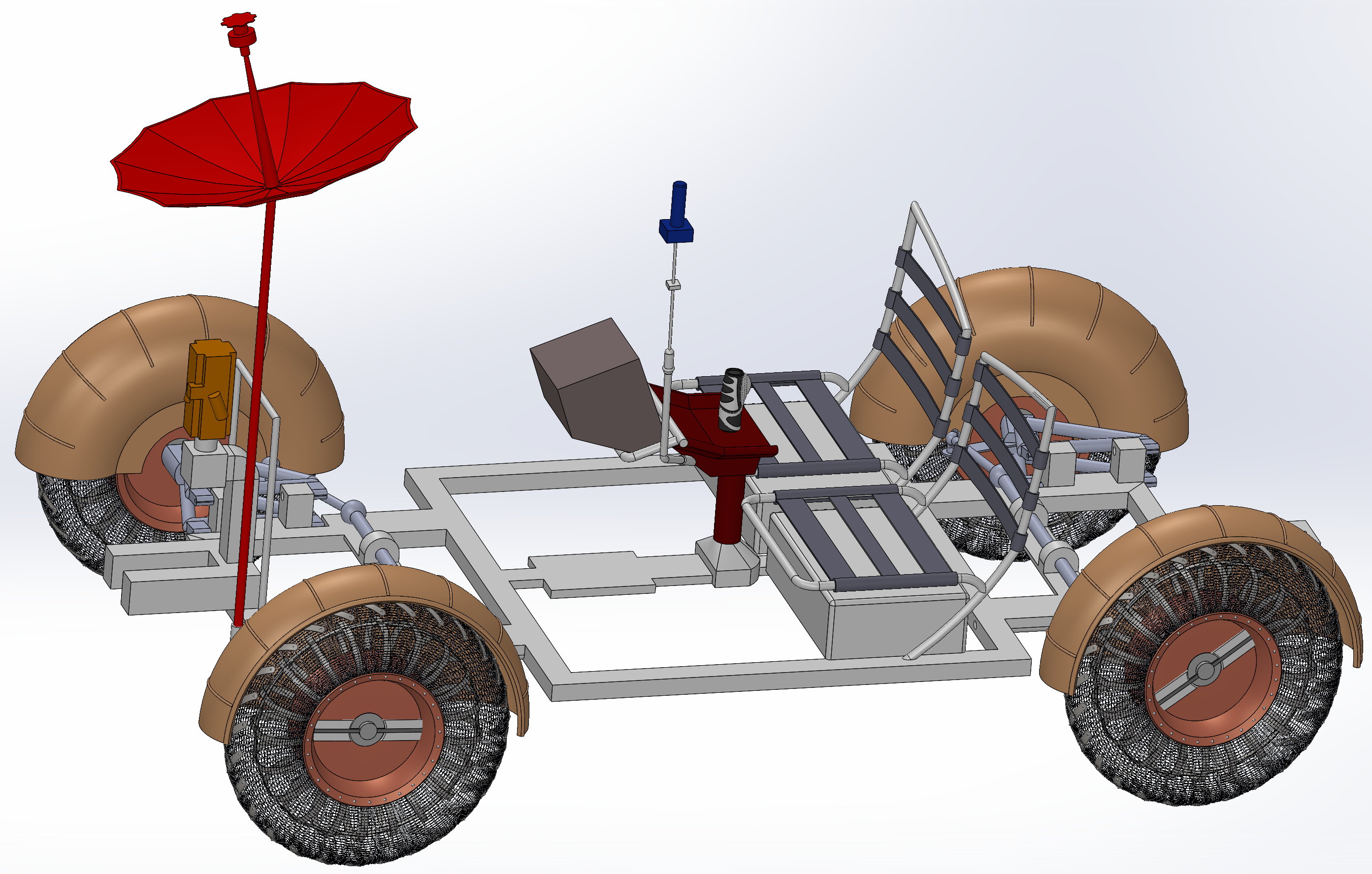 An Analysis of the Mobility Performance of the Apollo Mission Lunar Roving Vehicle (LRV)2025Extended Abstract for presentation at the 12th ECCOMAS Thematic Conference on Multibody Dynamics, Innsbruck, Austria.
An Analysis of the Mobility Performance of the Apollo Mission Lunar Roving Vehicle (LRV)2025Extended Abstract for presentation at the 12th ECCOMAS Thematic Conference on Multibody Dynamics, Innsbruck, Austria.


